
Page 11 - ePT114_輕課程Scratch(mBlock)機電整合與Arduino控制輕鬆學_課本PDF
P. 11
微課
1 四輪車機械結構
探討與建構
引用汽車為專題來學習機電整合與控制,是一項務實而生
活化的議題。一般教學常見的自走車、循跡車的設計,為取其
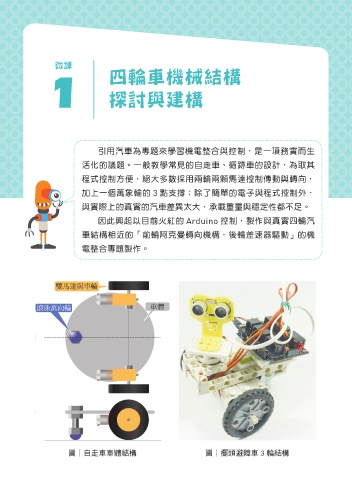
程式控制方便,絕大多數採用兩輪兩顆馬達控制傳動與轉向,
加上一個萬象輪的 3 點支撐;除了簡單的電子與程式控制外,
與實際上的真實的汽車差異太大,承載重量與穩定性都不足。
因此興起以目前火紅的 Arduino 控制,製作與真實四輪汽
車結構相近的「前輪阿克曼轉向機構,後輪差速器驅動」的機
電整合專題製作。
圖│自走車車體結構 圖│擺頭避障車 3 輪結構