
Page 13 - ePN054_輕課程 飛行機器人專題導向學習_課本PDF
P. 13
第 1 章 認識飛行機器人
1-2 飛行機器人與人體對應的概念
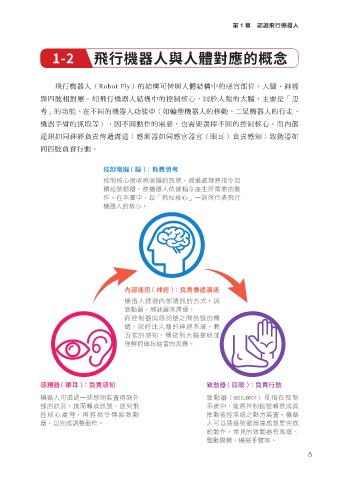
飛行機器人(Robot Fly)的結構可皆與人體結構中的感官部位、大腦、神經
與四肢相對應。如飛行機器人結構中的控制核心,同於人類的大腦,主要是「思
考」的功能。在不同的機器人功能中(如輪型機器人的移動、二足機器人的行走、
機器手臂的抓取等),因不同動作的需要,也需要選擇不同的控制核心。而內部
通訊如同神經負責傳遞溝通;感測器如同感官器官(眼耳)負責感知;致動器如
同四肢負責行動。
控制電腦(腦 ):負責思考
控制核心接收感測器的訊號,經過處理將指令回
饋給致動器,使機器人依據指令產生所需要的動
作。在本書中,以「飛控核心」一詞來代表飛行
機器人的核心。
內部通訊( 神經):負責傳遞溝通
機器人透過內部通訊的方式,與
致動器、感測器來溝通。
而控制器與感測器之間訊號的傳
遞,就好比人類的神經系統,將
五官的感知,傳送到大腦接收並
理解而做出適當的反應。
感測器( 眼耳 ):負責感知 致動器(四肢):負責行動
機器人可透過一些感測裝置得到外 致動器(actuator)是指在控制
部的狀況,進而轉成訊號,送到飛 系統中,能將控制信號轉換成具
控核心處理,再將指令傳給致動 推動被控系統之動力裝置。機器
器,以完成調整動作。 人可以透過致動器達成想要完成
的動作。常見的致動器有馬達、
電動開關、機械手臂等。
5