
Page 19 - 新一代科大四技機械群機件原理升學跨越講義
P. 19
Chapter 1 xዚࡡଣ
名 稱 符 號 含 意
(1) ίո֛ൿɪЪ 360° ᔷ٫މϜݛf
5. 曲柄或搖桿
(2) ̥߰Ъɓֹܓᓖਗ٫މศf
6. 機架 ո֛ஹאո֛ࠦf
7. 滑塊和導路 ߒҼ෯ɓ֛ٙਗ༩༶ਗf
͟ε࣬ஹഐΥϓɓdஹගೌ࿁༶ਗd
8. 結構
ɓࡈዚf
二 運動鏈
1 ༶ਗᗡ່֛ٙj
1. ᗡj͟ɧ˸ɪʘዚהଡ଼ϓٙஹༀໄf
2. ༶ਗᗡjਗ਼ε༶ਗ࿁ଡ଼ϓɓ၇༶ਗஹᕁӻ୕dԨЪɓ֛ٙ࿁༶ਗ٫f
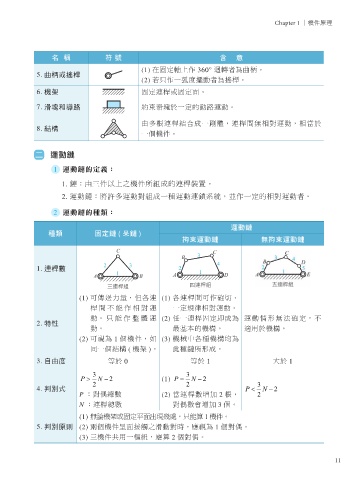
2 ༶ਗᗡٙ၇ᗳj
運動鏈
種類 固定鏈 ( 呆鏈 )
拘束運動鏈 無拘束運動鏈
1. 連桿數
(1) ̙ෂɢඎdШஹ (1) ஹග̙Ъᆽʲe
ග ʔ ঐ Ъ ࿁ ༶ ɓ֛ܛ࿁༶ਗf
ਗd ̥ঐ Ъ ༶ (2) ɓஹո֛уϓމ ༶ਗઋҖೌجᆽ֛dʔ
2. 特性
ਗf ௰ਿ͉ٙዚf ቇ͜ዚf
(2) ̙ൖމ 1 ࡈዚdν (3) ዚʕ၇ዚѩމ
Νɓࡈഐ ( ዚݖ )f Ϥ၇ᗡהҖϓf
3. 自由度 ഃ 0 ഃ 1 ɽ 1
P 3 N 2 (1) P 3 N 2
2 2 3
4. 判別式 P N 2
P m࿁ਅᐼᅰ (2) ஹᅰᄣ̋ 2 ࣬d 2
N mஹᐼᅰ ࿁ਅᅰึᄣ̋ 3 ࡈf
(1) ೌሞዚݖאո֛̻ࠦ̈ତஈd̥ঐၑ 1 ዚf
5. 判別原則 (2) Շࡈዚяࠦટᙃʘਗ࿁ࣛdᏐൖމ 1 ࡈ࿁ਅf
(3) ɧዚ͜ɓᅹॲdᏐၑ 2 ࡈ࿁ਅf
11