
Page 6 - AppInventor2與IoT物聯網應用完美結合含雲端資料庫Firebase
P. 6
App Inventor 2 與 IoT 物聯網應用
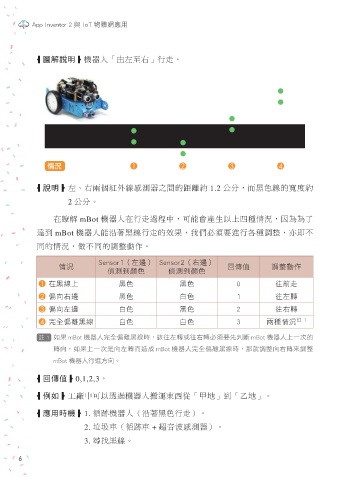
圖解說明 ዚኜɛ̸͟Ї̛БԐf
情況 1 2 3 4
說明 ̸e̛Շࡈߎ̮ᇞชኜʘගٙ൷ᕎߒ 1.2 ʮʱdϾලЍᇞٙᄱܓߒ
2 ʮʱf
ίᐝ༆ mBot ዚኜɛίБԐཀʕd̙ঐึପ͛˸ɪ̬၇ઋرdΪމމə
༺Ց mBot ዚኜɛঐضഹලᇞБԐٙࣖ؈dҢࡁ̀ࠅආБ၇ሜd͵уʔ
ΝٙઋرdਂʔΝٙሜਗЪf
Sensor1(左邊) Sensor2(右邊)
情況 回傳值 調整動作
偵測到顏色 偵測到顏色
1 在黑線上 黑色 黑色 0 往前走
2 偏向右邊 黑色 白色 1 往左轉
3 偏向左邊 白色 黑色 2 往右轉
4 完全偏離黑線 白色 白色 3 兩種情況 註1
註1 如果 mBot 機器人完全偏離黑線時,該往左轉或往右轉必須要先判斷 mBot 機器人上一次的
轉向,如果上一次是向左轉而造成 mBot 機器人完全偏離黑線時,那就調整向右轉來調整
mBot 機器人行進方向。
回傳值 0,1,2,3f
例如 ʈᅀʕ̙˸ீཀዚኜɛย༶؇Г͠ήՑɔήf
應用時機 1. ృ༦ዚኜɛضഹලЍБԐf
2. չѫԓృ༦ԓ + ൴ࠪتชኜf
3. రҬලᇞf
6